
Offline Robot Programming
Sigma Robotics is SprutCAM's official distributor in North America

SprutCAM – all-in-one Software for Industrial Robot Programming (CAD + CAM + OLP)
Streamlined industrial robot programming workflow.
Calculate Toolpath
An extensive range of toolpath strategies for milling, cutting, welding, additive, polishing, painting, stone roughing.
Roughing toolpaths:
parallel, equidistant, high-speed, adaptive roughing, roughing plane, roughing rotary machining, hole machining, and many more.
Finishing toolpaths:
finishing waterline, plane, scallop (3D constant step-over), morph, rotary machining, 5D surfacing.
Contouring toolpaths:
2D, 3D, and 5D contouring.
Special toolpaths:
Stone roughing, welding, heat treatment, sculpture milling.
Optimize
Handle singularities, collisions, reach zone limits and redundant axes movements with a dedicated powerful tool: robot axis map
Axes available in robot axis map:
A6 (6th axis), rails, turn table, lead and lean angles.
What is shown on the map:
Out of reach, out of limits, singularities, collisions. Map also shows the toolpath with rapid and work feeds.
Automated:
Just push “Build automatically”. It works in most cases.
Precise control:
Edit any point of the toolpath with simulation preview in real time.
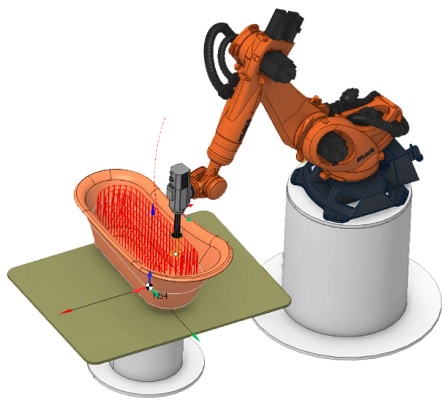
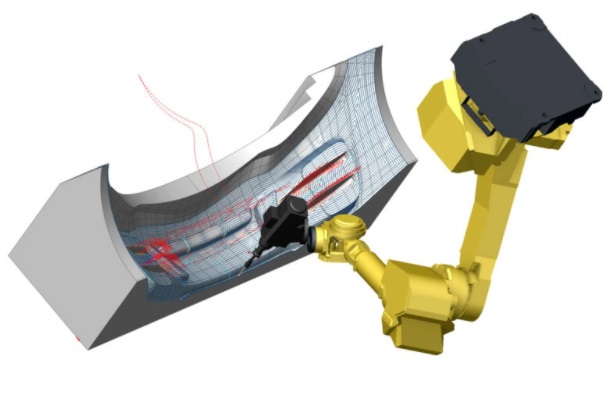
Simulate
Full robotic cell simulation. Material removal simulation.
Smooth and high resolution.
Full robotic cell simulation:
Robot, tables, rails, end effector, fences, fixtures, tool magazine and any other imported geometry is used for simulation.
Material removal, additive, painting:
Dedicated simulation models for material removal, additive and painting for result control.
Launch control program
Post-processing, calibration and robot cell-creating tools.
Create your own robot cell kinematic model with the dedicated app Machine Maker:
Easy-to-use application for rapid SprutCAM-ready robotic cell creation. Included in SprutCAM installation package.
Calibrate TCP and Base:
Mobile application for quick and precise TCP calibration and transferring calibration data to SprutCAM.
Postprocess
Generic postprocessors for major robot manufacturers included: Kuka, Fanuc, Motoman, ABB, Staubli, Nachi and more. Order postprocessor customization from nearby SprutCAM dealer.
The SprutCAM Robot kinematic scheme library includes a wide range of robots from all major manufacturers:
- ABB
- Fanuc;
- KUKA;
- Staubli;
- Yaskawa Motoman;
- Toshiba;
- Mitsubishi;
- Nachi;
- and many more
In addition, standard templates allow for the rapid creation of custom kinematic schemes for robots and robotic cells.
APPLICATIONS
- Milling
- Cutting
- Additive
- Welding
- Polishing
- Pick & Place
- Sculpture / Stone Carving
- Disk Tool
- Hot Wire Cut
SprutCAM 15 highlights:
- New experimental parametric 3D CAD
- New .NET postprocessor generator
- New fixtures
- Multi-parts projects: thombstone machining, in process workpiece (IPW)
- New MTM workflow
- MachineMaker 2.0 for robots
- Axis map for 5-axis machines
- New Adaptive lathe operation
- Turning and other improvements in G-code based operation
- Power option and offset pass in cladding
- Barrel mills and other improvements in tools
- Check holder function in the Rotary roughing operation and more!
FANUC Robots offline Programming
ROBOGUIDE is the leading of offline programming product on the market for FANUC robots. The ROBOGUIDE family of process focused software packages allow users to create, program and simulate a robotic work-cell in 3-D without the physical need and expense of a prototype work-cell setup.
FANUC ROBOGUIDE is a robot simulator that simulates both the robot’s motion and application commands, significantly reducing the time it takes to create new motion setups. To ensure minimal impact on production, cells can be designed, tested and modified entirely offline. To save 3-D modelling time, part models can be imported from a PC as CAD data. The robot simulation software’s extensive library also allows users to select and modify parts and dimensions as required. Designed to be intuitive and extremely easy to use, ROBOGUIDE requires very little, if any, training. It is also available with dedicated tools for specific applications.
ABB Robots offline Programming
RobotStudio enables the robot programming, training, and optimization to be done on a PC in an office without disturbing production. How does RobotStudio Work? This innovative robotic program is a PC application for modeling, offline programming, and the simulation of robot cells.
Offline programming is the best way to maximize return on investment for robot systems. ABB's simulation and offline programming software, RobotStudio, allows robot programming to be done on a PC in the office without shutting down production, this allows you to perform tasks such as training, programming, and optimization without disturbing the production.
The tool is built on the ABB Virtual Controller, an exact copy of the real software that runs your robots in production. This allows very realistic simulations to be performed, using real robot programs and configuration files identical to those used on the shop floor.
RobotStudio comes with a full package of features and add-ons allowing for perfect offline simulation reducing risks, fastening the start-ups, shortening the changeovers and at the end increasing the productivity.
KUKA Robots Offline Programming
KUKA.Sim creates a digital twin and thus an identical image of the subsequent production process. The 3D simulation covers the entire planning process: from the design of the process to the visualization of material flows and bottlenecks to the PLC code. The data are 100 percent consistent, which means that the virtual controller and the real controller work with exactly the same data. In this way, KUKA.Sim creates the basis for virtual commissioning, so that new production lines can already be tested and optimized in advance.
YASKAWA MOTOMAN Robots Offline Programming
MotoSim EG-VRC
MotoSim EG-VRC (Enhanced Graphics Virtual Robot Controller) is designed for accurate offline programming of complex systems. With the virtual robot controller function, simulation software can be used for:
- Optimizing robot and equipment placement
- Reach modeling
- Accurate cycle calculations
- Automatic path generation
- Collision detection
- System configuration
- Condition file editing
- Functional Safety Unit (FSU) configuration
- Remote access to real robot controller
The virtualized controller also allows the simulation software to operate and display a programming pendant interface identical to the real controller. The VRC
completely simulates the Motoman® robot controller software.